
Balita
 Home / Balita / Balita sa industriya / Paano Mo Pipiliin ang Tamang Horizontal Slewing Drive para sa Iyong Application?
Home / Balita / Balita sa industriya / Paano Mo Pipiliin ang Tamang Horizontal Slewing Drive para sa Iyong Application? Paano Mo Pipiliin ang Tamang Horizontal Slewing Drive para sa Iyong Application?
 2026.05.13
2026.05.13
 Balita sa industriya
Balita sa industriya
Ang pagpili ng tamang horizontal slewing drive ay isa sa mga desisyong mukhang diretso sa ibabaw ngunit mabilis na nagpapakita ng mga layer ng pagiging kumplikado kapag hinuhukay mo ang mga kinakailangan sa application. Ang isang mahinang pagpili ay hindi lamang hindi maganda ang pagganap — ito ay nabigo nang maaga, lumilikha ng mga pasanin sa pagpapanatili, at sa mga sistemang kritikal sa kaligtasan ay maaaring magdulot ng magastos na downtime o mga aksidente. Ang gabay na ito ay naglalakad sa bawat makabuluhang variable ng pagpili, na nagbibigay sa mga inhinyero at mga espesyalista sa pagkuha ng praktikal na balangkas para sa tamang pagtawag sa unang pagkakataon.
Ang Talagang Ginagawa ng Horizontal Slewing Drive
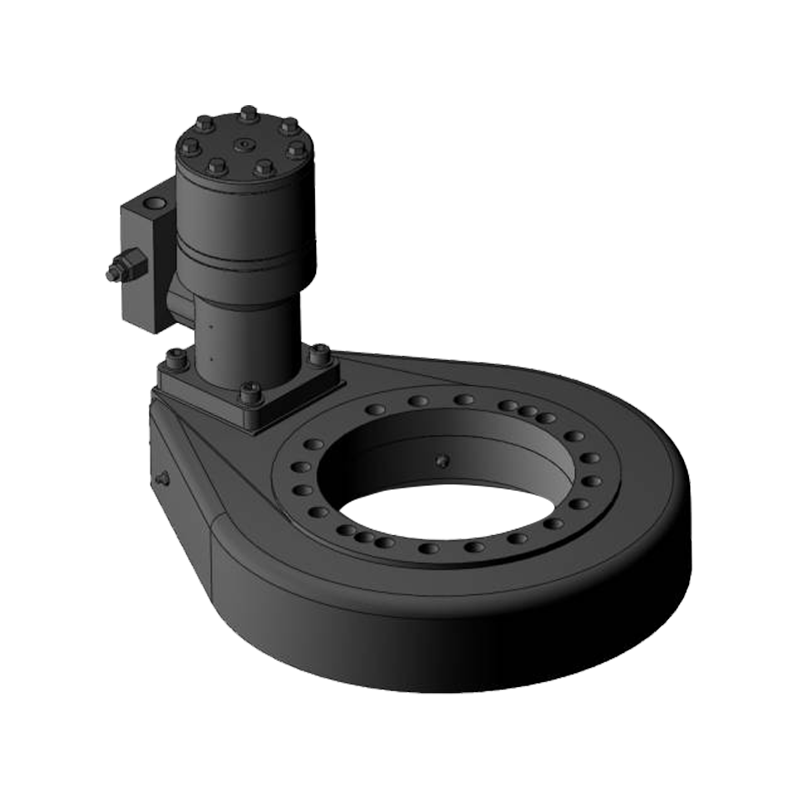
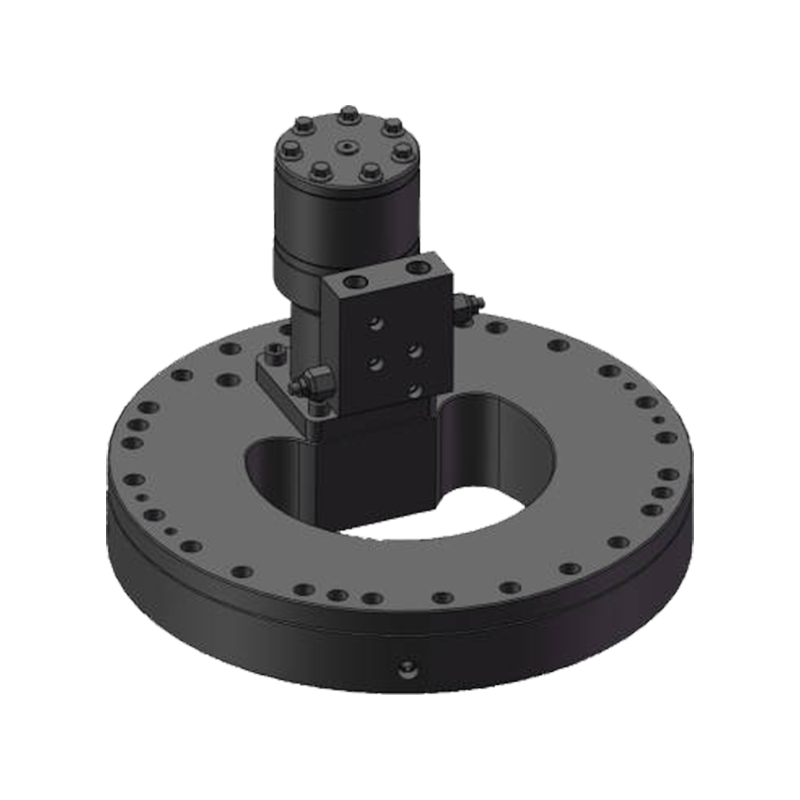
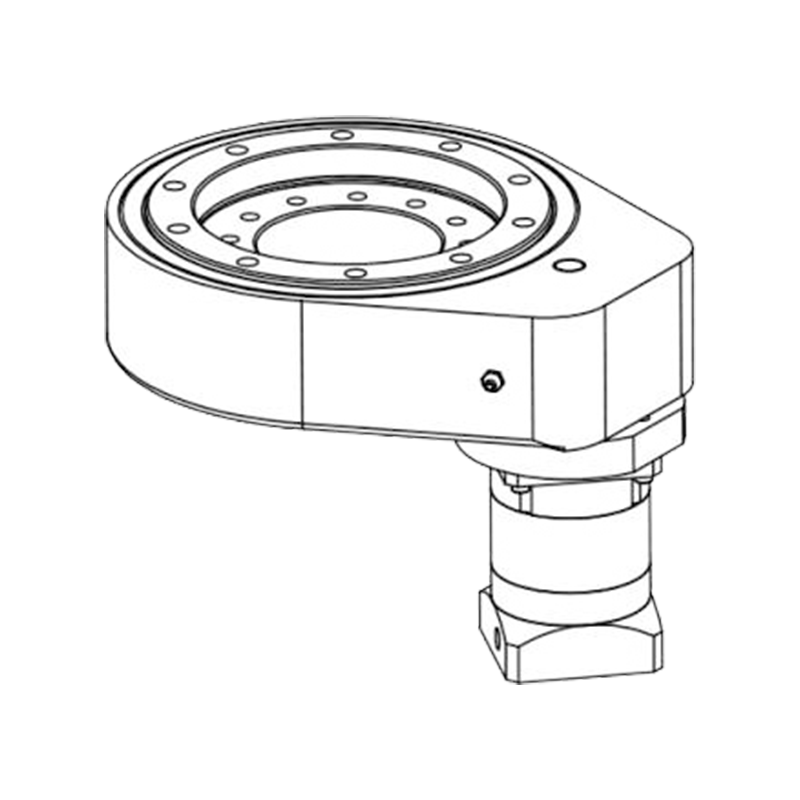
Ang horizontal slewing drive ay isang ganap na nakapaloob na rotary actuator na pinagsasama ang mekanismo ng pagbabawas ng worm gear sa isang slewing ring bearing sa isang pinagsamang housing. Pinangangasiwaan ng slewing ring ang radial, axial, at moment load na ipinataw ng umiikot na istraktura sa itaas, habang ang worm gear ay nagbibigay ng mekanikal na kalamangan na kailangan upang himukin ang pag-ikot na iyon gamit ang medyo maliit na input ng motor. Ang "horizontal" ay tumutukoy sa oryentasyon ng output axis ng drive — ang pag-ikot ay nangyayari sa paligid ng isang vertical axis, na ginagawa itong natural na pagpipilian para sa mga application kung saan ang isang istraktura ay dapat umindayog, mag-pan, o patuloy na umiikot sa pahalang na eroplano.
Hindi tulad ng mga standalone na slewing ring na ipinares sa mga panlabas na gearbox, pinapasimple ng pinagsamang horizontal slewing drive ang pag-install, pinapabuti ang integridad ng sealing, at binabawasan ang pagsisikap ng engineering na kinakailangan upang idisenyo ang nakapalibot na istraktura. Ang pagsasama-samang ito ang eksaktong dahilan kung bakit nangingibabaw ang mga ito sa mga application tulad ng mga solar tracker, crane turntable, aerial work platform, wind turbine yaw system, at satellite antenna positioner — kahit saan kailangan ang compact, self-contained rotary actuation na may mataas na kapasidad ng pagkarga.
Pagsusuri sa Pag-load: Ang Non-Negotiable Starting Point
Ang bawat horizontal slewing drive na seleksyon ay nagsisimula sa isang kumpletong pagsusuri ng pagkarga. Ang paglaktaw o pagtatantya sa hakbang na ito ay ang nag-iisang pinakakaraniwang pinagmumulan ng napaaga na pagkabigo. May tatlong kategorya ng load na dapat sabay-sabay na hawakan ng drive, at lahat ng tatlo ay dapat ma-quantified bago magsimula ang anumang paghahambing ng catalog.
Axial Load
Ang axial load ay gumagana parallel sa output axis ng drive — sa isang horizontal slewing drive, ito ay karaniwang ang patay na timbang ng umiikot na istraktura sa itaas. Ang isang solar panel array, isang crane turntable superstructure, o isang antenna assembly ay nagpapataw ng kanilang timbang pababa sa pamamagitan ng drive. Ito ang pinakasimpleng pag-load upang kalkulahin: ito ay mahalagang kabuuang masa ng lahat ng bagay na umiikot sa itaas ng drive, na pinarami ng gravitational acceleration, at ipinahayag sa mga kilonewton.
Radial Load
Ang radial load ay kumikilos patayo sa output axis — pahalang, sa kaso ng horizontal slewing drive. Ang presyon ng hangin sa isang malaking panel o antenna ay ang pinakakaraniwang pinagmumulan ng radial load sa mga panlabas na aplikasyon. Ang sira-sira na pag-load na dulot ng isang off-center center of gravity sa rotating assembly ay nag-aambag din ng radial component. Ang mga radial load ay madalas na dynamic at may direksyon na variable, na ginagawang kritikal ang pagtatantya ng peak value kaysa sa average na pagkalkula ng halaga.
Overturning Moment
Ang overturning moment ay ang baluktot na load na sumusubok na ikiling ang umiikot na istraktura na may kaugnayan sa drive housing. Nabubuo ito sa tuwing ang center of gravity ng umiikot na assembly ay hindi direktang nasa itaas ng rotational centerline ng drive, o kapag ang mga pahalang na puwersa (tulad ng hangin) ay kumikilos sa taas sa itaas ng drive mounting plane. Ang overturning moment ay ipinahayag sa kilonewton-meters at madalas ang pinaka-demand na load parameter — maraming drive na pumasa sa axial at radial load checks ay nabigo sa overturning moment capacity.
Mga Kinakailangan sa Torque at Motor Sizing
Kapag naitatag na ang mga load, dapat kalkulahin ang kinakailangang output torque. Ito ang torque na kailangan sa output ring ng drive para malampasan ang lahat ng resistive forces at mapabilis ang load sa kinakailangang rotational speed sa loob ng katanggap-tanggap na oras. Ang mga pangunahing nag-aambag sa kinakailangang torque ay friction sa loob ng slewing ring bearing (na tumataas sa axial load at overturning moment), aerodynamic drag sa rotating structure, at ang inertial torque na kailangan sa mga yugto ng acceleration.
Pahalang na slewing drive ay tinukoy sa pamamagitan ng kanilang rated holding torque at rated working torque — ang mga ito ay hindi pareho ang figure. Ang paghawak ng metalikang kuwintas ay ang pinakamataas na static load na maaaring mapanatili ng drive nang walang pag-ikot; working torque ay ang tuloy-tuloy na torque na magagamit sa panahon ng operasyon. Ang self-locking na katangian ng worm gear (naroroon kapag ang anggulo ng lead ay nasa ibaba ng friction angle, kadalasan kapag ang gear ratio ay lumampas sa humigit-kumulang 20:1) ay nangangahulugan na maraming horizontal slewing drive ang kayang hawakan ang kanilang posisyon sa ilalim ng load nang walang hiwalay na preno — isang feature na nagpapasimple sa disenyo ng system sa mga application tulad ng solar tracker kung saan ang drive ay dapat magkaroon ng isang panel angle laban sa windz load.
Ang pagpili ng motor ay sumusunod mula sa kinakailangang input torque (output torque na hinati sa ratio ng gear, isinaayos para sa kahusayan ng drive) at ang kinakailangang bilis ng input (output rotational speed na pinarami ng gear ratio). Karamihan sa mga horizontal slewing drive ay tumatanggap ng karaniwang IEC o NEMA frame motors, at marami ang binibigyan ng motor-ready na may machined motor mounting flange.
Pinaghahambing ang Mga Parameter ng Key Selection
| Parameter | Ano ang Dapat Matukoy | Karaniwang Saklaw | Panganib sa Pagpili kung Hindi Natukoy |
| Axial Load Capacity | Kabuuang umiikot na masa × gravity | 5 kN – 2,000 kN | Bearing race deformation, seizure |
| Overturning Moment | Eccentric load × moment arm | 0.5 kNm – 500 kNm | Pagkasira ng ngipin ng ring gear, pagkiling |
| Gumagana Torque | Friction drag inertia torque | 0.5 kNm – 200 kNm | Overload ng motor, pagkasuot ng worm gear |
| Bilis ng Output | Kinakailangan ang slew rate (°/min o rpm) | 0.01 – 10 rpm | Error sa pagpoposisyon, thermal overrun |
| Gear Ratio | Self-locking na pangangailangan kumpara sa kahusayan | 20:1 – 100:1 | Back-driving, kinakailangan ng preno |
Mga Pagsasaalang-alang sa Environmental at Duty Cycle
Ang isang drive na nakakatugon sa mga kinakailangan sa mekanikal na pagkarga sa papel ay maaari pa ring mabigo nang maaga kung mali ang pagtutukoy sa kapaligiran. Ang mga horizontal slewing drive ay malawakang naka-deploy sa labas, kadalasan sa malupit na mga kondisyon, at ang housing, sealing, at surface treatment ay dapat na tumugma sa operating environment.
- IP Rating: Para sa mga panlabas na aplikasyon, ang isang minimum na IP65 ay karaniwang kinakailangan upang ibukod ang alikabok at mga jet ng tubig. Ang mga kapaligiran sa dagat o baybayin ay nangangailangan ng IP67 o mas mataas, na may mga stainless steel na fastener at karagdagang proteksyon sa kaagnasan sa mga nakalantad na ibabaw. Kumpirmahin na ang IP rating ay nalalapat sa ganap na naka-assemble na drive kasama ang motor interface — ang ilang mga drive ay may rating na IP65 sa housing ngunit may hindi protektadong motor mounting faces na nagiging ingress point.
- Saklaw ng Temperatura: Ang mga karaniwang pampadulas ay mahusay na gumaganap sa pagitan ng −20°C at 80°C. Ang mga aplikasyon sa mga kapaligiran sa arctic, mga pag-install sa disyerto, o malapit sa mga pinagmumulan ng init ng industriya ay nangangailangan ng mga tinukoy na mababang temperatura o mataas na temperatura na mga greases. Kumpirmahin ang detalye ng pampadulas ng tagagawa ng drive at ang saklaw ng temperatura na saklaw nito bago i-finalize ang pagpili para sa mga deployment sa matinding klima.
- Ikot ng tungkulin: Pahalang na slewing drive in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Proteksyon sa kaagnasan: Ang mga karaniwang drive ay gumagamit ng zinc-phosphate primed at painted steel housings na sapat para sa mga inland na kapaligiran. Ang mga instalasyon sa baybayin at malayo sa pampang ay nangangailangan ng mga hot-dip galvanized housing, stainless steel output ring, o epoxy-coated na ibabaw depende sa kategorya ng corrosivity ng site.
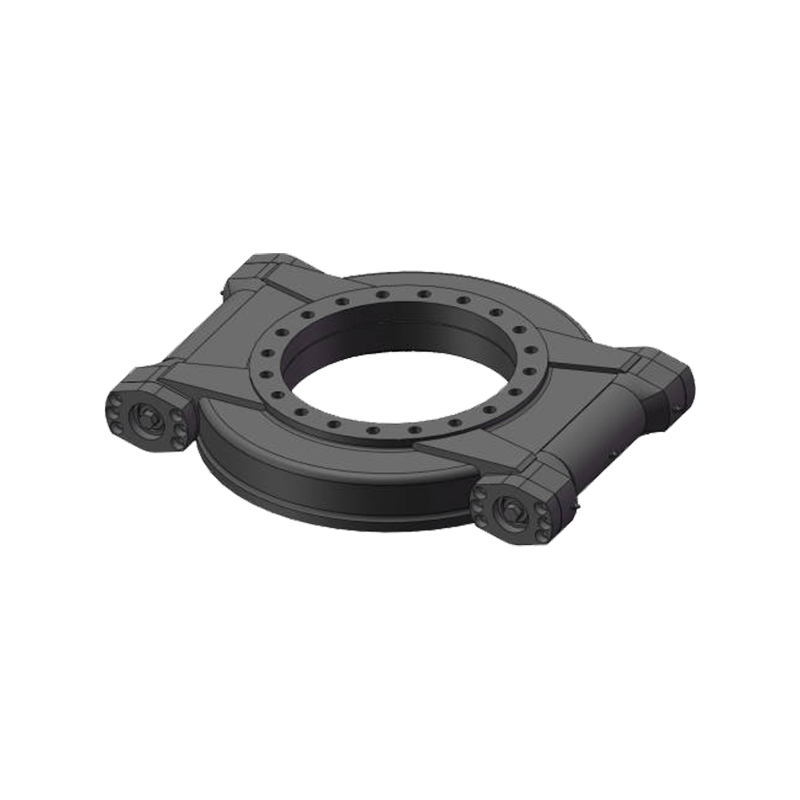
Pag-mount ng Configuration at Interface Geometry
Ang pisikal na pagsasama ng slewing drive sa nakapalibot na istraktura ay isang praktikal na hadlang na dapat malutas sa panahon ng pagpili, hindi sa panahon ng pag-install. Available ang mga horizontal slewing drive na may iba't ibang configuration ng output ring — panlabas na gear (mga ngipin sa labas ng output ring), panloob na gear (mga ngipin sa loob), at walang ngipin (friction-driven o direktang koneksyon) — bawat isa ay angkop sa iba't ibang kinematic arrangement. Ang mga panlabas na singsing na output ng gear ay pinaka-karaniwan at pinapayagan ang worm shaft na iposisyon sa labas ng diameter ng singsing, na pinapanatili ang motor at gearbox na naa-access para sa pagpapanatili. Ang mga panloob na pagsasaayos ng gear ay ginagamit kapag ang drive ay dapat isama sa isang compact rotating assembly.
Ang mga sukat ng bolt circle sa parehong fixed housing at ang umiikot na output ring ay dapat na ma-verify laban sa mating structure. Maraming mga manufacturer ang nag-aalok ng mga customized na bolt pattern, mounting flanges, at output shaft interface bilang mga standard na opsyon — ang pagtukoy sa mga ito sa yugto ng pag-order ay mas mura kaysa sa mga machining adapter sa field. I-verify din ang diameter ng through-hole kung ang mga cable, hydraulic lines, o pneumatic hose ay dapat dumaan sa gitna ng drive — hindi lahat ng horizontal slewing drive ay nag-aalok ng center bore, at hindi posible ang pag-retrofit ng feature na ito.

Mga Salik sa Kaligtasan at Mga Inaasahan sa Buhay ng Serbisyo
Ang mga na-publish na rating ng load para sa mga horizontal slewing drive ay karaniwang nakabatay sa static proof load o dynamic na mga kalkulasyon sa buhay ng nakakapagod, at ang paglalapat ng naaangkop na safety factor sa itaas ng kalkuladong operating load ay karaniwang kasanayan sa engineering. Para sa karamihan ng mga application na hindi kritikal sa kaligtasan, angkop ang safety factor na 1.5× hanggang 2× sa working torque at load capacity. Para sa mga application kung saan ang drive failure ay nagdudulot ng panganib sa mga tauhan — aerial work platform, medical positioning equipment, o vehicle-mounted crane — safety factor na 3x o mas mataas ay maaaring tukuyin, at ang third-party na sertipikasyon sa mga nauugnay na pamantayan sa kaligtasan ng makinarya (tulad ng EN 13000 para sa mga crane o ISO 11684 para sa kagamitang pang-agrikultura) ay dapat kumpirmahin sa pagmamaneho.
Ang inaasahang buhay ng serbisyo ay dapat na talakayin sa mga tuntunin ng buhay ng tindig ng L10 (ang bilang ng mga oras ng pagpapatakbo kung saan ang 10% ng populasyon ng magkaparehong mga drive ay inaasahang magpapakita ng pagkabigo sa pagkapagod ng bearing) at buhay ng pagkapagod sa ibabaw ng worm gear. Para sa mga aplikasyon ng solar tracking, isang 25-taong buhay ng disenyo ang pamantayan sa industriya; kumpirmahin na ang pagkalkula ng buhay ng L10 ng tagagawa ay batay sa aktwal na profile ng operating load ng application, hindi isang generic na reference na kondisyon.
Praktikal na Checklist Bago I-finalize ang Iyong Pinili
- Kumpirmahin ang axial load, peak radial load, at maximum overturning moment sa ilalim ng pinakamasamang sitwasyon (karaniwang maximum na bilis ng hangin na sinamahan ng maximum na sira-sira na load)
- I-verify na ang rated working torque ng napiling drive ay lumampas sa kinakalkula na kinakailangang output torque ng napiling safety factor
- Suriin ang gear ratio para sa self-locking kung kinakailangan ang passive position holding, o kumpirmahin ang detalye ng preno kung hindi
- Kumpirmahin ang rating ng IP, saklaw ng temperatura, at proteksyon ng kaagnasan na tumutugma sa kapaligiran ng pag-install
- I-verify ang mga sukat ng bolt circle, configuration ng output ring, at mga kinakailangan sa center bore laban sa disenyo ng mating structure
- Humiling ng pagkalkula ng buhay na may dalang L10 batay sa aktwal na profile ng pag-load ng aplikasyon, hindi mga kundisyon ng sanggunian ng catalog
- Kumpirmahin ang pagiging tugma ng interface ng motor — laki ng frame, diameter ng shaft, at mounting flange standard (IEC o NEMA)
- Suriin ang detalye ng pagpapadulas at agwat ng muling pag-greasing laban sa nakaplanong iskedyul ng pagpapanatili
Ang pagpili ng horizontal slewing drive ay nagbibigay ng reward sa methodical analysis. Ang mga drive mismo ay matatag, mahusay na napatunayan na mga bahagi - ang mga pagkabigo na nangyayari sa field ay halos palaging nasusubaybayan sa isang hindi natukoy na parameter ng pag-load, isang hindi tugmang rating sa kapaligiran, o isang hindi napapansing hadlang sa interface. Gawin ang bawat isa sa mga variable sa itaas nang sistematikong, makipag-ugnayan sa suporta sa engineering ng tagagawa kapag hindi karaniwan ang mga kondisyon ng aplikasyon, at ang resulta ay isang drive na gumagana nang maaasahan para sa buong nilalayon na buhay ng serbisyo ng system na pinapagana nito.

Ang Jiangsu Manchen Transmission Technology Co, Ltd ay higit sa paglikha ng pasadyang, maaasahan, at tumpak na pagpatay sa mga bearings para sa magkakaibang industriya, patuloy na nagbabago upang matugunan ang pinakamataas na pamantayan at naghahanap ng mga pagkakataon sa pakikipagtulungan. Maaasahan at matatag na supplier ng pagpatay sa China.
Mabilis na mga link
Mga link sa produkto
Makipag -ugnay sa amin
-
Address:8, Nanqiu Road, bayan ng Huangtu, Jiangyin City , China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
