
Balita
 Home / Balita / Balita sa industriya / Ano ang Istraktura, Mga Bahagi, at Prinsipyo ng Paggawa ng isang Horizontal Slewing Drive?
Home / Balita / Balita sa industriya / Ano ang Istraktura, Mga Bahagi, at Prinsipyo ng Paggawa ng isang Horizontal Slewing Drive? Ano ang Istraktura, Mga Bahagi, at Prinsipyo ng Paggawa ng isang Horizontal Slewing Drive?
 2026.04.27
2026.04.27
 Balita sa industriya
Balita sa industriya
Pahalang na slewing drive ay mga precision rotary actuato assemblies na pinagsasama ang isang slewing ring bearing, isang worm gear reduction stage, at isang drive housing sa isang pinagsamang unit na may kakayahang sumuporta, umiikot, at humawak ng mga load sa pahalang na eroplano. Hindi tulad ng mga nakasanayang rotary gearbox na nagpapadala ng torque kasama ang isang fixed axis, ang mga slewing drive ay namamahala ng sabay-sabay na radial load, axial load, at mga sandali ng pagbaligtad habang naghahatid ng kontroladong pag-ikot — ginagawa silang mas piniling solusyon sa pagmamaneho para sa mga aplikasyon tulad ng mga solar tracker, construction crane, aerial work platform, industrial robots, satellite-duttable na mga turntable, at satellite-duttable. Ang pag-unawa sa kung paano binuo ang mga horizontal slewing drive at kung paano gumagana ang mga ito sa isang mekanikal na antas ay mahalaga para sa mga inhinyero na tumutukoy sa mga sistema ng pagmamaneho, mga tauhan sa pagpapanatili na nagse-servi ng mga naka-install na kagamitan, at mga team sa pagkuha na sinusuri ang mga opsyon sa supplier.
Pangkalahatang Istraktura ng isang Pahalang na Slewing Drive
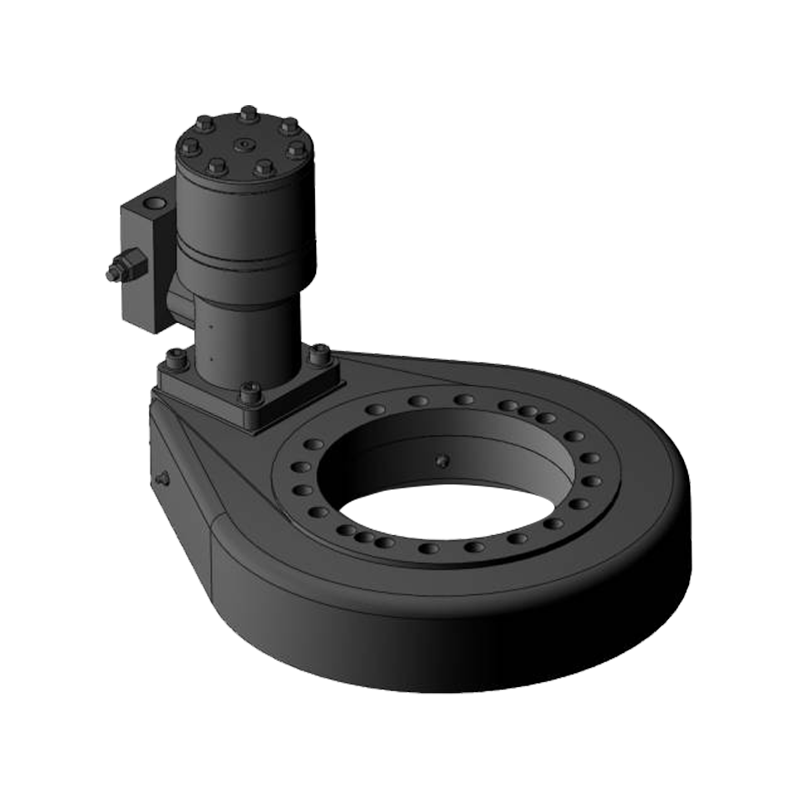
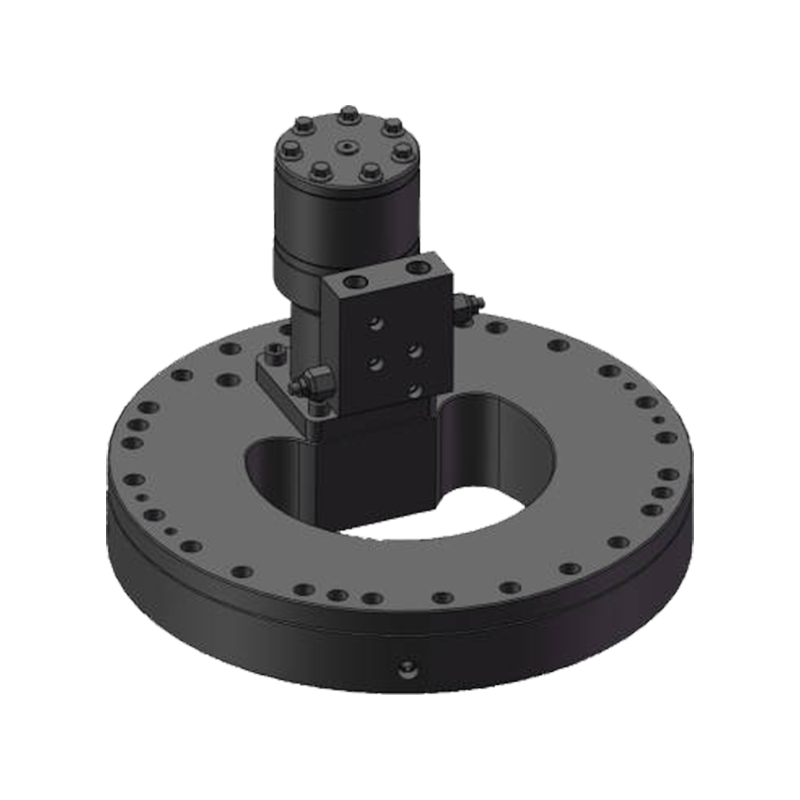
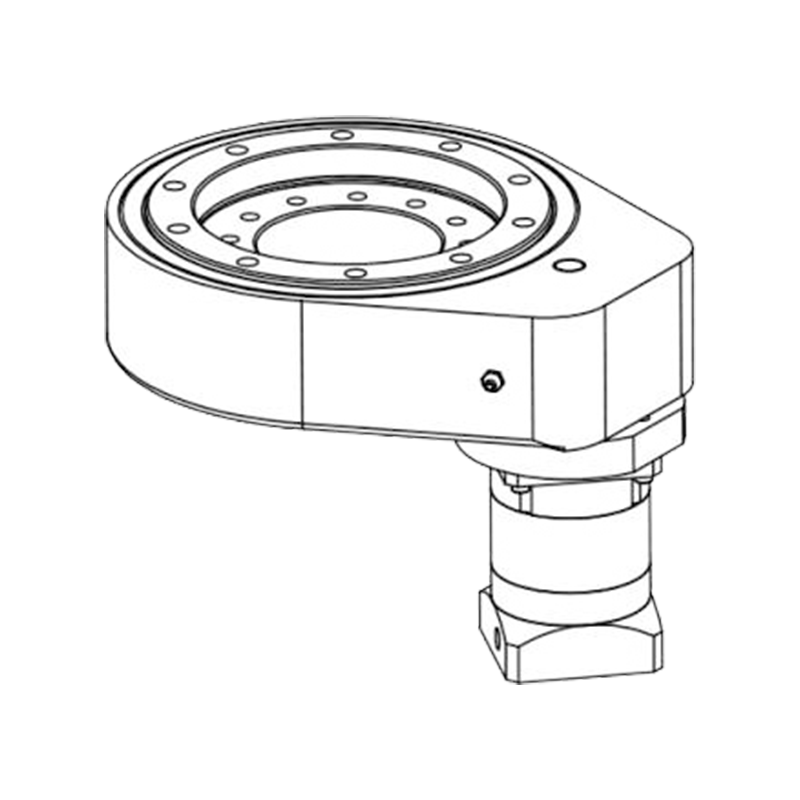
Ang horizontal slewing drive ay isang self-contained assembly na nagsasama ng mga function ng bearing support, gear reduction, at rotational drive sa iisang compact housing. Sa horizontal configuration, ang axis ng main slewing ring ay naka-orient nang patayo — ibig sabihin, ang umiikot na output table o flange ay umiikot sa vertical axis sa horizontal plane, na natural na oryentasyon para sa mga turntable, solar azimuth tracker, at crane slewing system kung saan ang payload ay umiikot nang pahalang sa paligid ng vertical center.
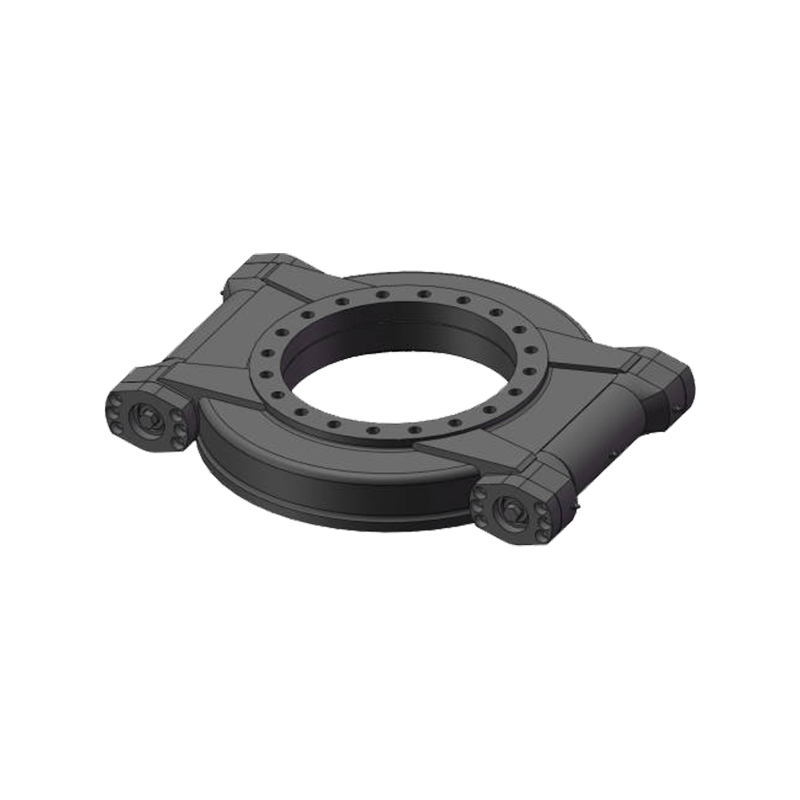
Ang panlabas na housing ng slewing drive ay machined mula sa cast iron o ductile iron at nagsisilbing parehong structural shell ng gearbox at ang mounting interface sa nakatigil na base structure. Ang housing ay nagbibigay ng katigasan upang labanan ang mga makabuluhang baluktot na sandali na nabuo kapag ang mga off-center load ay inilapat sa umiikot na output, at ito ay nakapaloob sa gear mesh sa isang selyadong, lubricated na kapaligiran. Ang mga mounting hole sa housing face at base ay nagbibigay-daan sa bolted connection sa machine frame sa standardized bolt circle diameters, at ang output flange o ring ay nagbibigay ng bolted interface sa umiikot na load sa itaas.
Ang kabuuang footprint ng assembly ay compact na may kaugnayan sa mga load na pinamamahalaan nito. Isang mid-range na pahalang na slewing drive na may sukat na humigit-kumulang 300 mm ang lapad karaniwang kayang suportahan ang mga axial load na lampas sa 50 kN, radial load na higit sa 30 kN, at overturning moments sa itaas 15 kN·m habang naghahatid ng mga output torque sa hanay na 5,000 hanggang 20,000 N·m, depende sa input ng motor at pagpili ng gear ratio. Ang power density na ito na may kaugnayan sa laki ng sobre ay isa sa mga pangunahing bentahe sa engineering na nagtutulak sa paggamit ng pinagsamang slewing drive na format sa hiwalay na pinagsama-samang mga solusyon sa bearing-at-gearbox.
Mga Pangunahing Bahagi at Ang Kanilang Mga Pag-andar
Ang bawat horizontal slewing drive ay binuo sa paligid ng isang hanay ng mga pangunahing mekanikal na bahagi na nagtutulungan upang magpadala ng pag-ikot ng input mula sa isang motor patungo sa kontrolado, mataas na torque na pag-ikot ng output ng slewing ring. Ang bawat bahagi ay nagsisilbi ng isang tiyak at hindi mapapalitang function sa landas ng pagkarga.
Slewing Ring Bearing
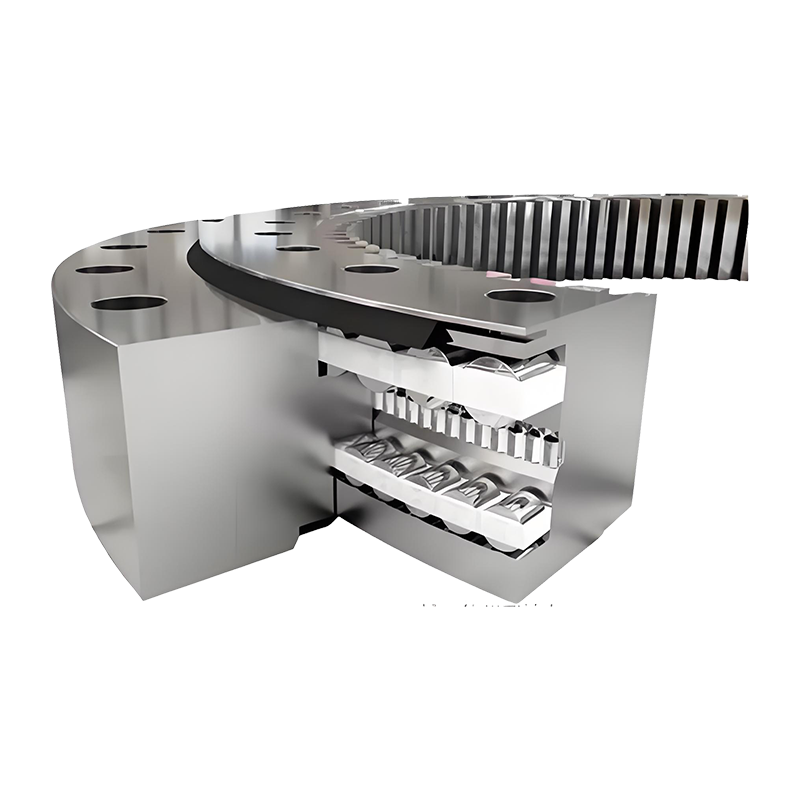
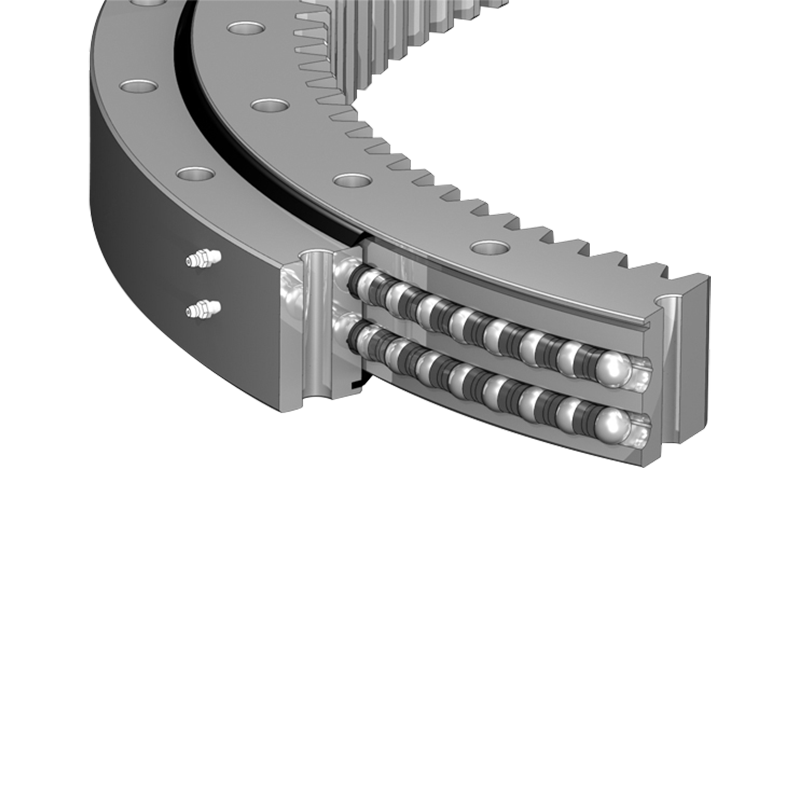
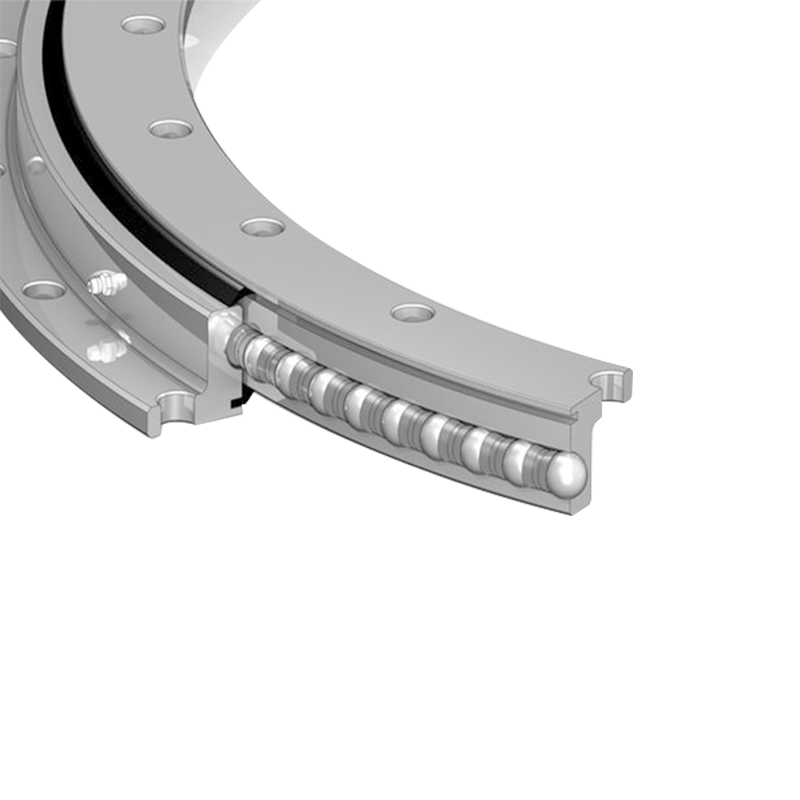
Ang slewing ring ay ang central structural component ng assembly. Ito ay isang malaking diyametro na rolling element na may pinagsama-samang gear — karaniwang isang worm wheel ring gear — na ginawa sa alinman sa panloob o panlabas na singsing. Sa mga horizontal slewing drive, ang gear ay karaniwang ginagawa sa panloob na ibabaw ng panlabas na singsing o ang panlabas na ibabaw ng panloob na singsing, depende sa partikular na disenyo. Ang mga rolling elements sa pagitan ng inner at outer rings ay nagdadala ng lahat ng inilapat na load — axial force mula sa bigat ng payload, radial force mula sa horizontal loading, at overturning moment mula sa eccentric load — habang pinapayagan ang mga ring na umikot nang may kaunting friction.
Ang mga slewing ring sa mga pahalang na drive ay karaniwang ginagamit single-row four-point contact ball bearings or crossed roller bearings . Gumagamit ang four-point contact ball bearings ng gothic arch raceway profile na nagbibigay-daan sa bawat bola na makipag-ugnayan sa raceway sa apat na puntos nang sabay-sabay, na nagbibigay-daan sa isang hilera ng mga bola na magdala ng axial load mula sa magkabilang direksyon, radial load, at overturning moments. Ang mga crossed roller bearings ay kahaliling cylindrical roller sa 90-degree na oryentasyon sa isang hilera, na nakakamit ng napakataas na stiffness at moment capacity sa isang manipis na cross-section. Ang parehong mga uri ay ginagamit sa mga horizontal slewing drive, na may mga crossed roller na disenyo na pinapaboran kapag ang pinakamataas na rigidity at katumpakan ay kinakailangan, at ang mga four-point contact ball na disenyo ay pinapaboran para sa cost-effectiveness sa mas mabigat ngunit hindi gaanong precision-demanding na mga application.
Worm Gear Set
Ang yugto ng pagbabawas ng worm gear ay ang mekanismo kung saan pinaparami ang metalikang kuwintas ng motor at ang bilis ng pag-input ay nababawasan sa mababang bilis, mataas na torque na pag-ikot ng output na kinakailangan ng application. Ang worm shaft — isang helically threaded shaft na direktang pinapaandar ng input motor — ay nagdudugtong sa mga ring gear na ngipin sa slewing ring, na gumaganap bilang worm wheel sa gear pair. Habang umiikot ang worm shaft, ang helix angle ng worm thread ay bumubuo ng tangential force sa ring gear teeth, na nagtutulak sa kanila at sa slewing ring sa paligid ng rotation axis.
Ang mga ratio ng worm gear sa mga slewing drive ay karaniwang mula sa 20:1 hanggang 100:1 o mas mataas sa loob ng isang yugto ng pagbabawas, na nagbibigay ng malaking torque multiplication mula sa mga compact input motor package. Ang worm shaft ay karaniwang ginagawa mula sa case-hardened alloy steel na may profile sa ground thread upang makamit ang tumpak na pagkakadikit ng ngipin at mabawasan ang backlash. Ang mga ngipin ng ring gear ay karaniwang pinuputol mula sa through-hardened medium carbon steel o, sa mga premium na disenyo, mula sa bronze alloy, na nagbibigay ng mga kanais-nais na katangian ng friction laban sa steel worm at binabawasan ang pagkasira sa parehong mga bahagi.
Worm Shaft Bearings at Housing
Ang worm shaft ay sinusuportahan sa magkabilang dulo sa loob ng housing sa pamamagitan ng rolling element bearings — karaniwang tapered roller bearings o angular contact ball bearings — na nagdadala ng mga radial load na nabuo ng worm-to-ring gear mesh at ng axial thrust forces na nabuo ng helix angle ng worm thread. Ang wastong preload sa mga shaft bearings na ito ay kritikal para sa pagpapanatili ng pare-parehong worm-to-ring gear mesh contact sa buong hanay ng load ng drive. Ang hindi sapat na preload ay nagbibigay-daan sa worm shaft na lumihis sa ilalim ng pagkarga, nagpapataas ng backlash at nagpapabilis ng pagkasira ng ngipin; ang sobrang preload ay nagpapataas ng bearing friction at heat generation, binabawasan ang mekanikal na kahusayan at pinaikli ang buhay ng serbisyo ng bearing.
Sistema ng pagbubuklod
Ang mabisang sealing ay mahalaga sa slewing drive service life, partikular sa mga outdoor application gaya ng solar trackers at mobile crane kung saan ang assembly ay nalantad sa ulan, alikabok, temperature cycling, at UV radiation. Ang mga horizontal slewing drive ay gumagamit ng kumbinasyon ng mga labyrinth seal, lip seal, at O-ring face seal sa interface sa pagitan ng umiikot na ring at ng stationary na housing, at sa mga worm shaft entry point sa housing. Ang rolling element na lukab ng slewing ring ay karaniwang tinatakan ng mga rubber seal na nakakabit sa mga bearing ring, na pumipigil sa pagkawala ng lubricant at pagpasok ng contaminant sa primary bearing interface.
Prinsipyo ng Paggawa: Paano Nabubuo ang Pag-ikot at Torque
Ang operating sequence ng horizontal slewing drive ay nagsisimula sa motor — alinman sa isang de-koryenteng motor na may planetary gearbox input stage, isang hydraulic motor, o sa ilang mga disenyo ay isang direct-drive na servo motor — na naka-mount sa worm shaft input flange ng housing. Habang umiikot ang motor shaft, pinaikot nito ang worm shaft sa bilis ng input. Ang helical thread ng worm shaft ay nasa tuluy-tuloy na mesh na may mga ngipin ng ring gear ng panloob o panlabas na lahi ng slewing ring.
Kino-convert ng geometry ng worm-to-ring gear mesh ang mabilis na rotational motion ng worm shaft tungo sa mabagal, mataas na torque rotation ng slewing ring sa pamamagitan ng mechanical advantage na tinutukoy ng gear ratio. Kung makumpleto ng worm shaft ang isang buong rebolusyon, ang slewing ring ay umuusad ng ilang mga ring gear na katumbas ng bilang ng sinulid na nagsisimula sa uod. Ang isang single-start worm na sumusulong sa isang 60-tooth ring gear ay gumagawa ng isang 60:1 gear ratio — isang buong worm revolution ang gumagalaw sa ring gear sa eksaktong isang tooth pitch, at 60 worm revolution ang kumukumpleto ng isang buong pag-ikot ng slewing ring.
Ang tangential force na inilapat sa ring gear teeth ng worm thread ay ang produkto ng input torque na pinarami ng gear ratio at ang mechanical efficiency ng worm mesh. Ang mga worm gear ay hindi gaanong mahusay sa mekanikal kaysa sa parallel-axis na helical gear dahil sa sliding contact sa pagitan ng worm at wheel teeth kaysa sa rolling contact ng helical gear pairs. Ang mga halaga ng kahusayan para sa mga worm-driven slewing drive ay karaniwang nahuhulog sa 50% hanggang 80% na saklaw , depende sa lead angle ng worm, ang kondisyon ng lubrication, at ang mga materyales na ginamit. Ang mas mataas na anggulo ng lead (multi-start worm) ay nagpapabuti sa kahusayan ngunit binabawasan ang ratio ng gear bawat yugto; ang mas mababang mga anggulo ng lead ay nagpapabuti sa ratio ng gear ngunit binabawasan ang kahusayan at pinapataas ang pagbuo ng init sa mataas na bilis ng pag-input.
Pag-uugali sa Self-Locking
Ang isa sa pinakamahalagang functional na katangian ng worm-driven horizontal slewing drive ay ang likas nitong kakayahan sa self-locking. Kapag ang anggulo ng lead ng worm ay mas mababa sa isang halaga ng threshold — karaniwang mas mababa sa humigit-kumulang 6 hanggang 8 degrees , bagama't ang mga eksaktong halaga ay nakasalalay sa mga friction coefficient - pinipigilan ng geometry ng gear mesh ang ring gear mula sa pag-back-driving sa worm shaft. Nangangahulugan ito na kapag ang lakas ng motor ay tinanggal, ang slewing drive ay humahawak sa posisyon nito sa ilalim ng pagkarga nang hindi nangangailangan ng isang hiwalay na sistema ng pagpepreno. Ang puwersa ng reaksyon mula sa pag-load sa mga ring gear na ngipin ay bumubuo ng isang bahagi ng puwersa sa kahabaan ng axis ng worm shaft, ngunit pinipigilan ng friction sa worm-to-wheel contact ang puwersang ito na malampasan ang static friction at hinihimok ang worm na umikot.
Ang self-locking ay isang kritikal na feature na pangkaligtasan sa mga application gaya ng mga solar tracker, aerial work platform, at material handling equipment kung saan ang drive ay dapat magpanatili ng nakapirming posisyon sa ilalim ng mga inilapat na load sa panahon ng power interruptions o control system failures. Tinatanggal nito ang pangangailangan para sa mga panlabas na hawak na preno sa maraming mga aplikasyon, pinapasimple ang disenyo ng system at binabawasan ang bilang ng mga bahagi. Gayunpaman, ang mga self-locking slewing drive ay hindi maaaring i-back-drive para sa manual emergency positioning, na dapat isaalang-alang sa pagpaplano sa kaligtasan ng makina.

Mga Parameter ng Kapasidad ng Pag-load at Mga Detalye ng Pagpili
Ang pagpili ng tamang horizontal slewing drive para sa isang partikular na application ay nangangailangan ng pagsusuri ng apat na pangunahing parameter ng pagkarga nang sabay-sabay, dahil ang slewing ring bearing ay dapat na sumusuporta sa lahat ng inilapat na load nang sabay-sabay sa buong buhay ng serbisyo nito.
| Parameter ng Pag-load | Kahulugan | Pangunahing Dalhin na Bahagi | Karaniwang Yunit |
|---|---|---|---|
| Axial Load | Force parallel sa rotation axis (vertical sa horizontal drive) | Slewing ring rolling elements | kN |
| Radial Load | Force patayo sa rotation axis (horizontal) | Slewing ring rolling elements | kN |
| Overturning Moment | Baluktot na sandali mula sa sira-sira na pagkarga o lateral force | Slewing ring bearing couple | kN·m |
| Output Torque | Ang rotational driving torque na inihatid sa load | Worm gear mesh at ring gear | N·m |
Ang isang kritikal na aspeto ng pagpili ng slewing drive ay ang apat na parameter na ito ay nakikipag-ugnayan — isang drive na tumatakbo malapit sa na-rate na kapasidad ng overturning moment nito ay nagpababa ng available na kapasidad ng axial at radial load, at kabaliktaran. Ang mga talahanayan ng rating ng tagagawa ay nagbibigay ng pinagsamang mga sobre ng kapasidad ng pagkarga, at ang tamang pagpili ay nangangailangan ng pag-plot ng aktwal na inilapat na kumbinasyon ng pagkarga laban sa mga sobreng ito sa halip na ihambing ang mga indibidwal na parameter sa paghihiwalay.
Lubrication System at Mga Kinakailangan sa Pagpapanatili
Ang pangmatagalang pagganap ng isang horizontal slewing drive ay direktang tinutukoy ng kalidad at pagkakapare-pareho ng programa ng pagpapadulas nito. Dalawang magkahiwalay na lubrication circuit ang dapat mapanatili: ang slewing ring rolling element circuit at ang worm gear mesh circuit, na sa karamihan ng mga disenyo ay may karaniwang oil bath sa loob ng housing ngunit maaaring mangailangan ng iba't ibang grado ng lubricant sa mga application na may mataas na pagganap o matinding temperatura.
Ang worm gear mesh ay karaniwang lubricated sa pamamagitan ng oil splash mula sa isang reservoir na pinananatili sa ilalim ng housing hanggang sa antas na nagbibigay-daan sa ibabang bahagi ng ring gear teeth na lumubog sa langis habang umiikot, na nagdadala ng lubricant sa mesh contact zone. Ang mga inirerekomendang lubricant ay mga gear oil na may extreme pressure (EP) additives na binuo para sa mga worm gear application, na may ISO VG 220 o VG 460 na lagkit na grado na pinakakaraniwang tinutukoy. Ang mataas na sliding velocity sa worm-to-wheel contact ay bumubuo ng init na dapat pangasiwaan ng mga katangian ng lagkit-temperatura ng pampadulas, at mga pagitan ng pagpapalit ng langis ng 2,000 hanggang 4,000 na oras ng pagpapatakbo ay karaniwang para sa mga drive sa panlabas na serbisyo.
Ang slewing ring rolling elements ay nangangailangan ng grease lubrication na inilapat sa pamamagitan ng grease nipples na matatagpuan sa ring o housing. Ang grasa ay dapat tumagos sa rolling element raceway sa pamamagitan ng grease distribution grooves na naka-machine sa mga ring race. Sa mga panlabas na pag-install, ang mga agwat ng muling pagdaragdag ay dapat na nakahanay sa iskedyul ng pagpapanatili ng application — karaniwang bawat 6 hanggang 12 buwan para sa mga aplikasyon ng solar tracker at mas madalas para sa mga kagamitan sa konstruksiyon na nakalantad sa mga siklo ng paglalaba at kontaminasyon.
Mga Karaniwang Application ng Horizontal Slewing Drives
Ang mga katangian ng disenyo ng mga horizontal slewing drive — compact integrated construction, self-locking capability, mataas na overturning moment capacity, at kontroladong low-speed rotation — ginagawa silang angkop sa isang partikular at mahusay na tinukoy na hanay ng mga application kung saan ang mga katangiang ito ay kinakailangan nang sabay-sabay.
- Mga solar photovoltaic tracker: Ang mga single-axis azimuth tracker para sa utility-scale solar farm ay gumagamit ng mga horizontal slewing drive upang paikutin ang mga panel array sa paligid ng isang vertical axis, kasunod ng paggalaw ng azimuth ng araw sa buong araw. Ang katangian ng self-locking ay humahawak ng tumpak na posisyon ng panel sa panahon ng paglo-load ng hangin nang walang tuluy-tuloy na lakas ng motor, makabuluhang binabawasan ang pagkonsumo ng enerhiya at pagiging kumplikado ng control system.
- Mga mobile crane at teleskopiko na humahawak: Ang upper slewing structure ng mga mobile crane ay umiikot sa mga horizontal slewing drive na dapat suportahan ang buong overturning moment ng boom at lifted load habang nagbibigay ng maayos at kontroladong pag-ikot sa panahon ng slewing operations. Ang mataas na kapasidad ng overturning moment na sinamahan ng self-locking load holding ay parehong kritikal sa application na ito.
- Mga aerial work platform (AWP) at boom lift: Ang turntable sa base ng boom assembly ay umiikot sa isang pahalang na slewing drive, na sumusuporta sa buong bigat ng pinahabang boom, platform, at mga occupant bilang isang overturning moment. Ang compact na sobre sa loob ng istraktura ng base ng makina ay isang pangunahing kinakailangan na ang pinagsama-samang mga slewing drive ay nakakatugon nang mahusay.
- Mga pang-industriyang positioner at welding turntable: Pahalang na slewing drive rotate workpieces around a vertical axis for welding, inspection, or assembly operations, providing precise angular positioning under substantial workpiece weight. The combination of high axial load capacity and accurate positioning from the worm gear mesh makes them well-matched to this application class.
- Mga antenna ng komunikasyon sa satellite: Ang mga ground-based na tracking antenna ay gumagamit ng mga horizontal slewing drive para sa azimuth rotation, kung saan kinakailangan ang tumpak, backlash-minimized na pagpoposisyon upang mapanatili ang pagkakahanay ng antenna beam sa mga gumagalaw na satellite. Ang mga precision-ground worm profile at preloaded worm shaft bearings ay tinukoy sa mga application na ito para mabawasan ang angular positioning error.

Ang Jiangsu Manchen Transmission Technology Co, Ltd ay higit sa paglikha ng pasadyang, maaasahan, at tumpak na pagpatay sa mga bearings para sa magkakaibang industriya, patuloy na nagbabago upang matugunan ang pinakamataas na pamantayan at naghahanap ng mga pagkakataon sa pakikipagtulungan. Maaasahan at matatag na supplier ng pagpatay sa China.
Mabilis na mga link
Mga link sa produkto
Makipag -ugnay sa amin
-
Address:8, Nanqiu Road, bayan ng Huangtu, Jiangyin City , China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
